このページは?
- IRミラー と TOFカメラを組み合わせた空中像インタラクションを作った際のメモ
- 文献情報: 安藤 将平,小泉 直也.ホットミラーによる赤外光反射を用いた空中像インタラクション手法の提案.第64回 情報処理学会エンタテインメントコンピューティング研究会, 2022.06.16.(PDF)
- 作ったもの:VzenseSDK_Windowsを使って得たVCAM710の深度情報をUnityに送る。
VzenseSDKの動かし方
-
環境
Windows 11
Visual Studio 2019
OpenCV3.0.0 -
参考にしたページ
Visual StudioでOpenCVを使う方法
VisualStudio2019+OpenCVのデバッグでDLLが見つからない
手順
-
VzenseのSDK(Vzense_SDK_Windows)をGitHubからダウンロードする(uec-media-design-lab/Manual_Vzense_DCAM710/Vzense SDKを使用しても良い。)
- 展開する
- 展開する
-
OpenCV3.0.0をダウンロードする
-
他Verでも動かせるけど、用意されたsdkは3.0.0を使っていて設定変えるのが大変なので3.0.0を使う。
-
Cドライブ直下に配置(他verのOpenCVと競合しないよう注意)
-
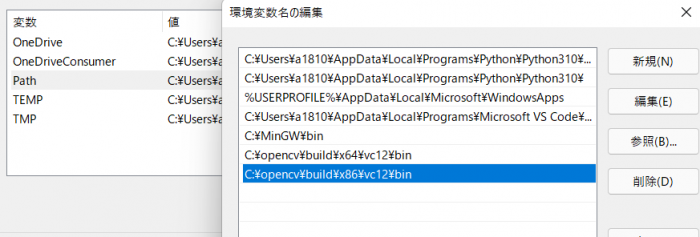
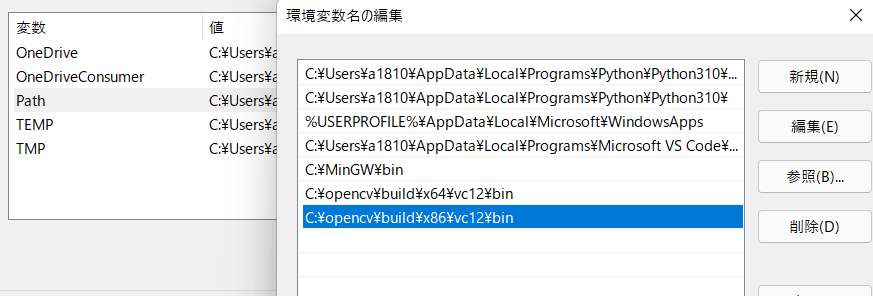
パスを通しておく(多分x86の方だけでいい)
C:\opencv\build\x64\vc12\bin
C:\opencv\build\x86\vc12\bin
-
-
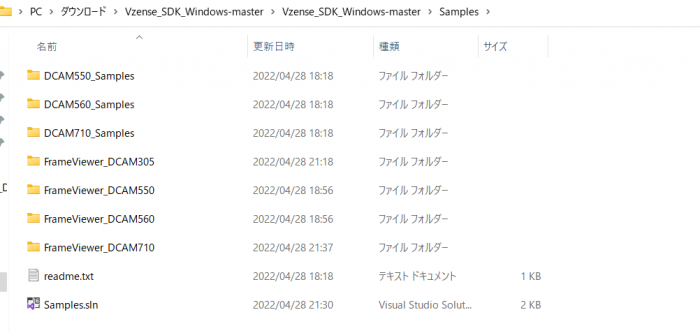
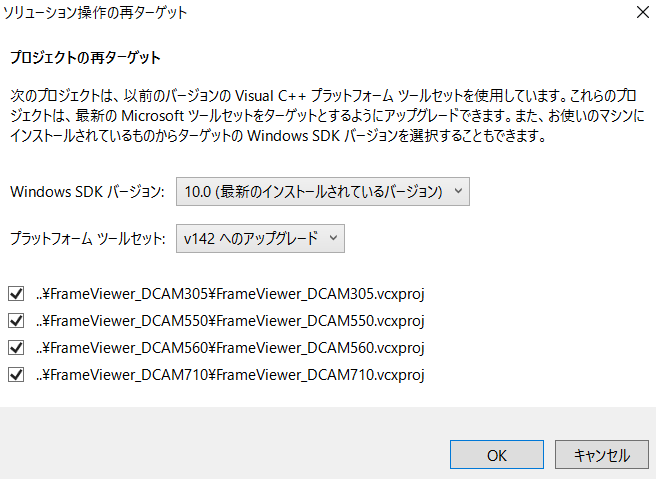
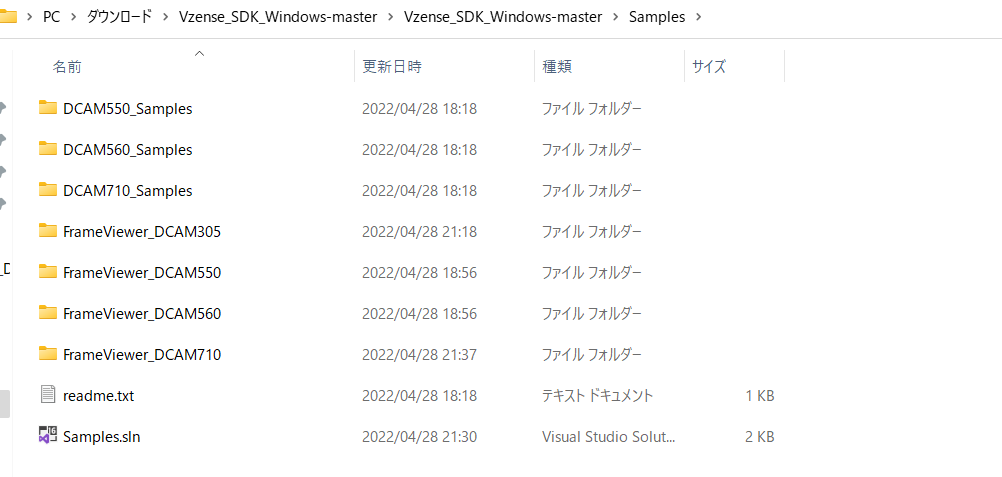
Vzense_SDK_WindowsのSample.slnをVisual Studioで開く
- 多分↓はOKで良い
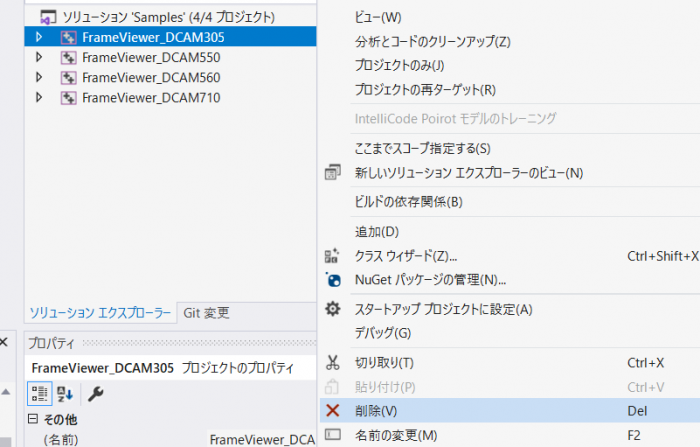
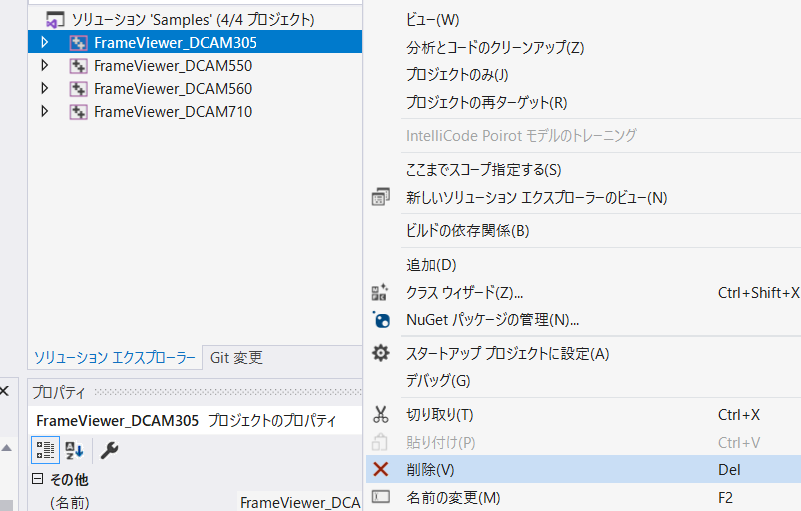
- DCAM710以外は使わないので消しとく。(残してるとうまくビルドできないときがある)
- 多分↓はOKで良い
-
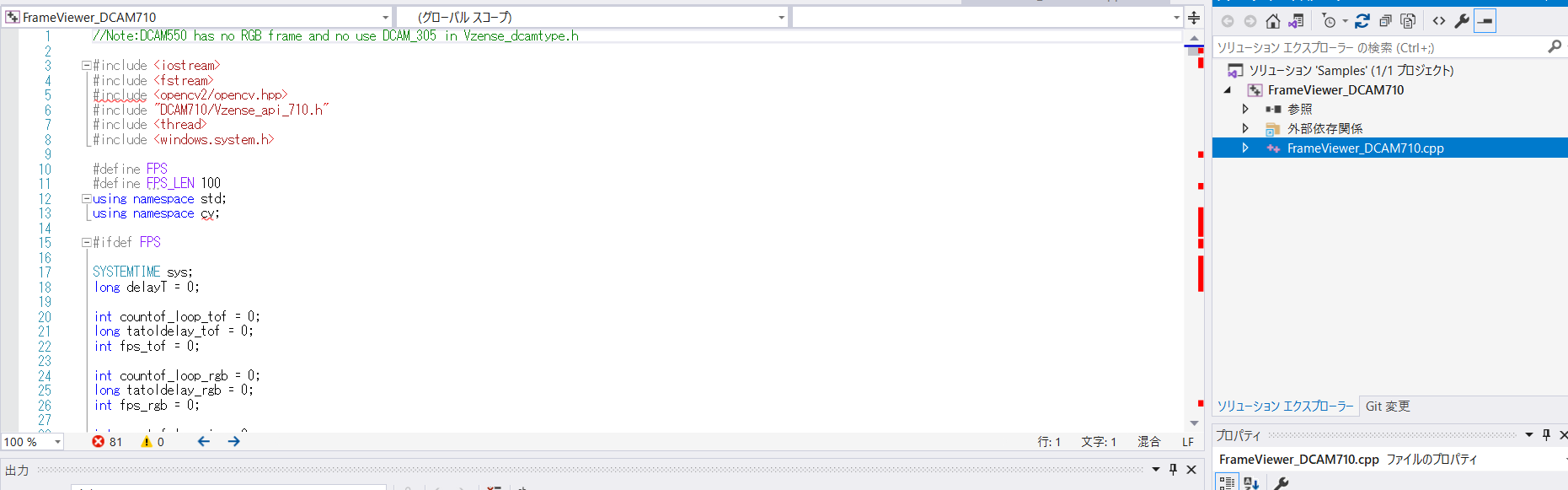
Frame_Viewer_DCAM710.cppを開く
- この時点ではOpenCVがうまくincludeされていない
- この時点ではOpenCVがうまくincludeされていない
-
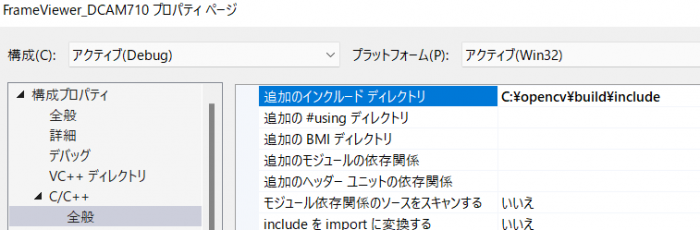
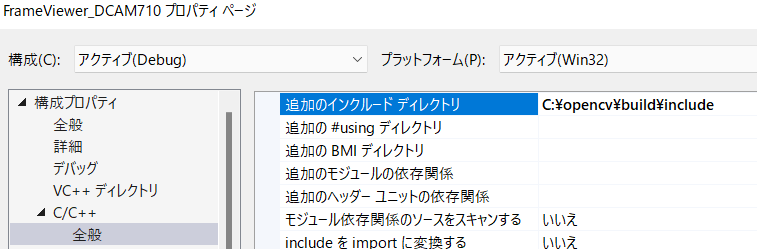
プロパティページを編集
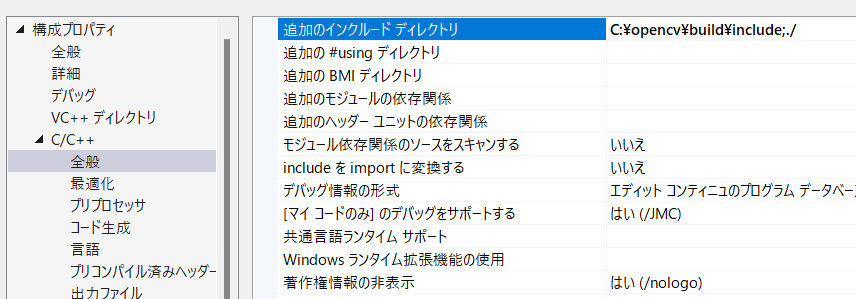
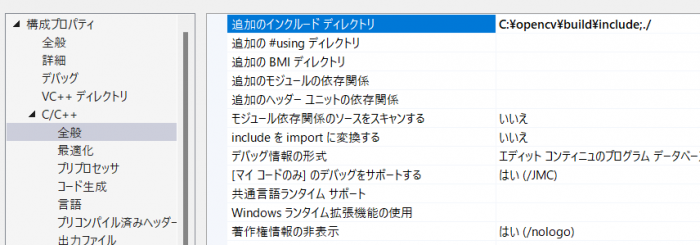
- 上部メニューのプロジェクト>プロパティ>C/C++>全般>追加のインクルードディレクトリに
C:\opencv\build\includeと設定する
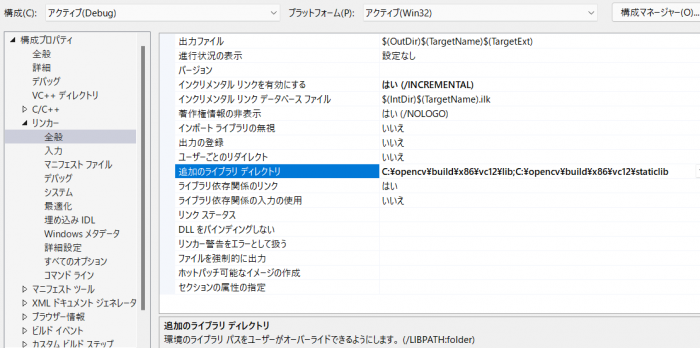
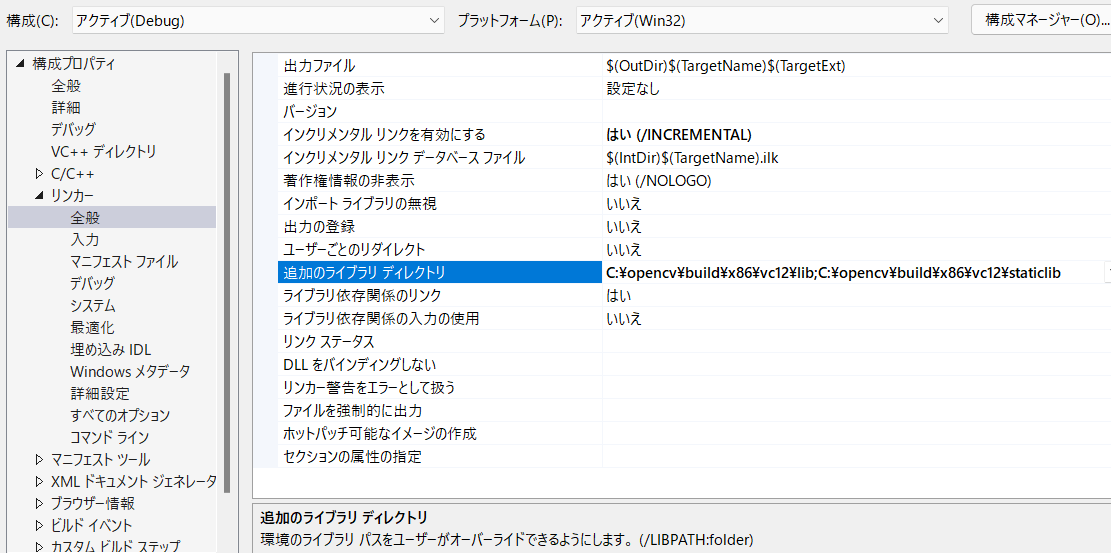
- プロジェクト>プロパティ>リンカー>全般>追加のライブラリディレクトリに
C:\opencv\build\x86\vc12\lib;C:\opencv\build\x86\vc12\staticlibと設定
(※リンカーの欄が無い場合は一度ビルドしてみると表示されるかも?)
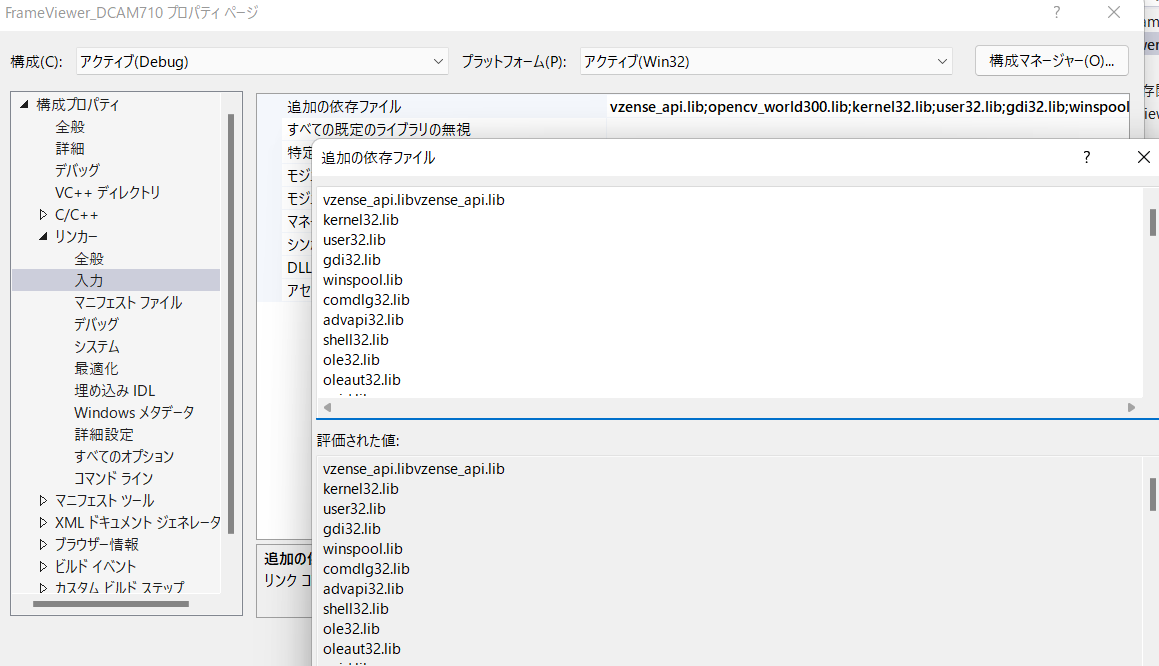
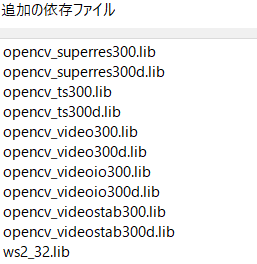
- プロジェクト>プロパティ>リンカー>入力>追加の依存ファイルを「追加の依存ファイル」の内容で上書きする。(C:\opencv\build\x86\vc12以下にある.libファイルをすべて追加している)

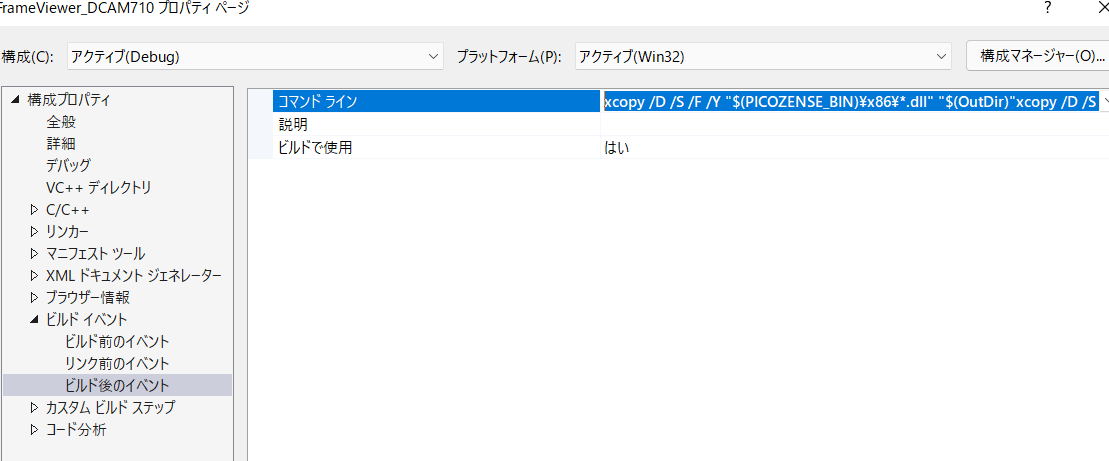
- プロジェクト>プロパティ>ビルドイベント>ビルド後のイベント>コマンドラインに書いてある内容を全て消す。
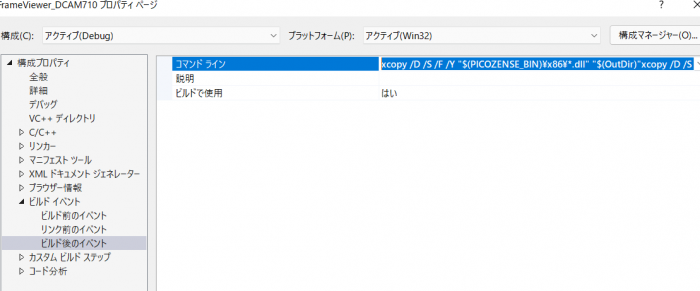
- 消していいのか正直よくわかっていないが、これがあると↓のエラーになる。ビルド後に何かファイルをコピーするためのものらしいが、とりあえず消しても問題なさそう。

- 上部メニューのプロジェクト>プロパティ>C/C++>全般>追加のインクルードディレクトリに
-
ビルドして実行する
- サンプルが動く
- サンプルが動く

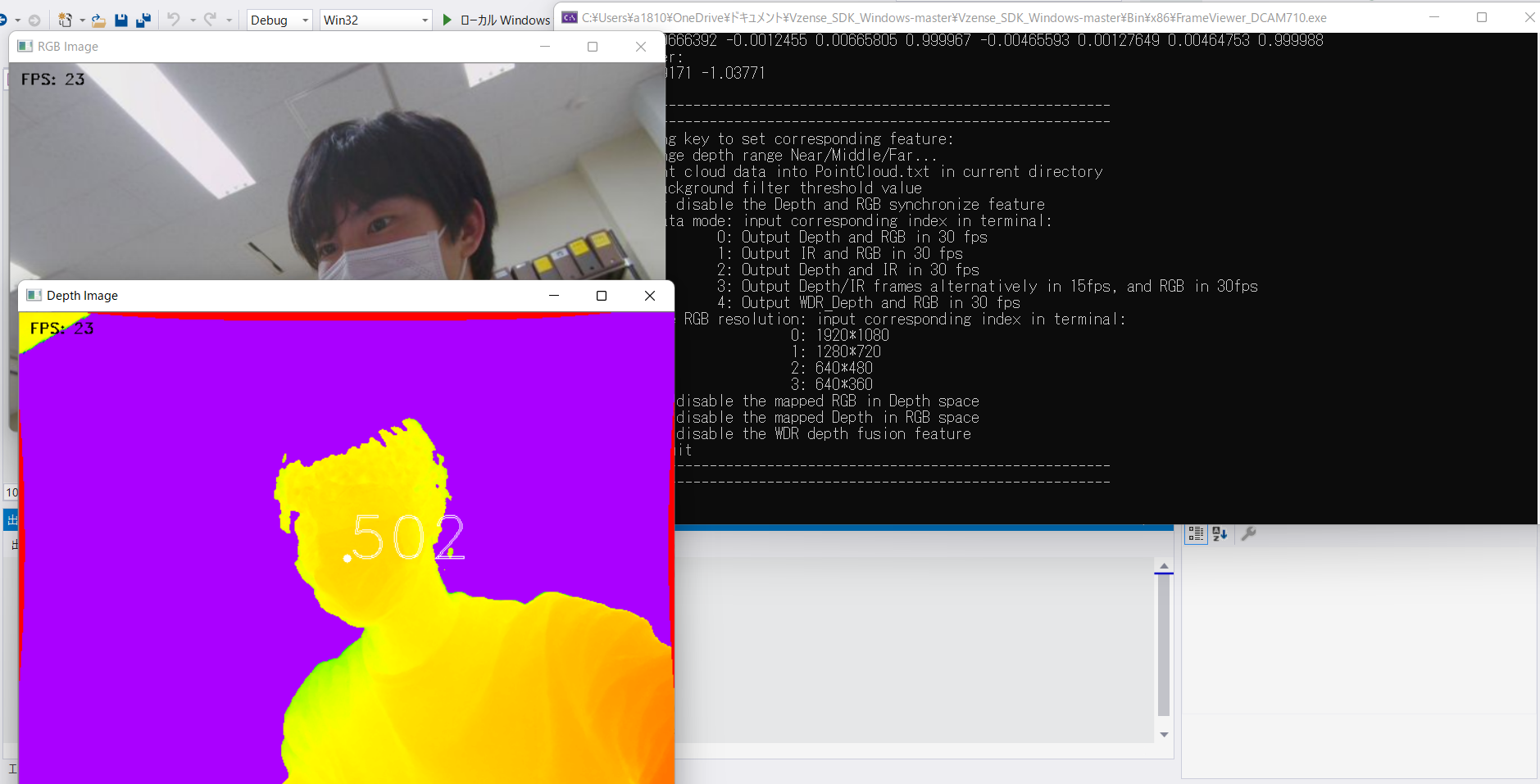
動作の様子
- あとはサンプルコードを都度書き換えれば深度情報とか表示できそう。
- ↓コンソールに中心の深度情報を表示してみた。
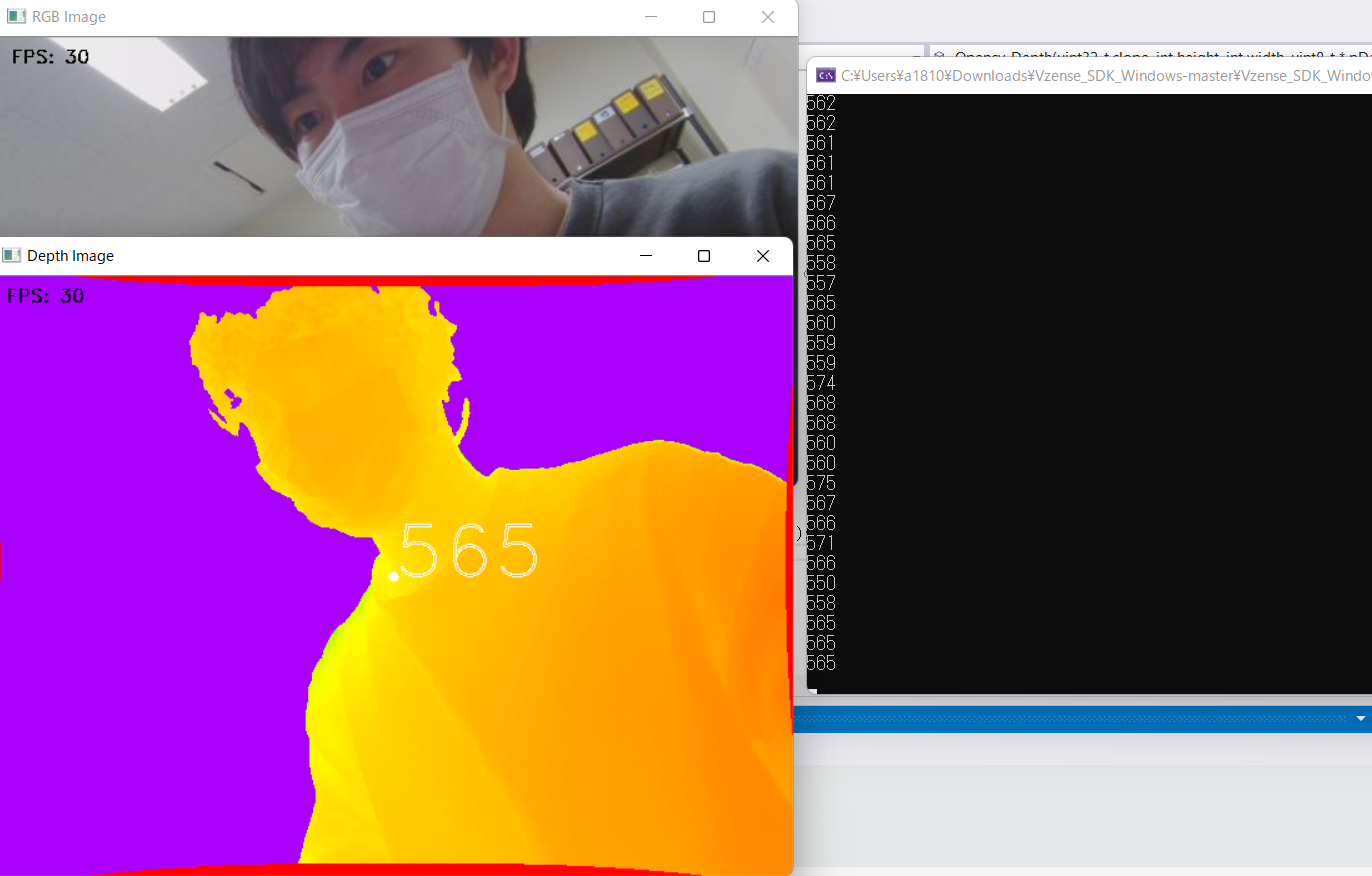
- ↓コンソールに中心の深度情報を表示してみた。
UnityとのUDP通信
- 参考にしたページ
C++とUnity(C#)を使ったUDP通信
手順
-
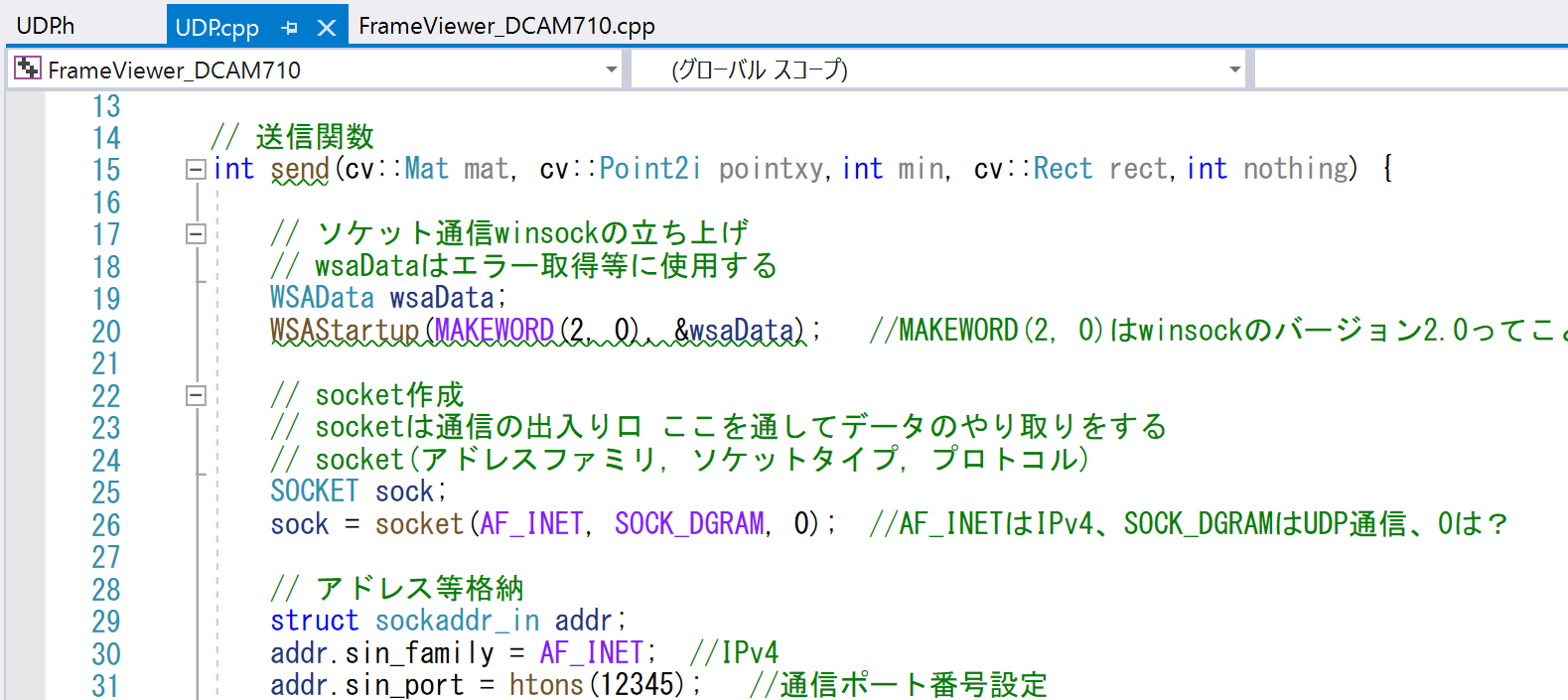
C++側での送信プログラム
-
プロパティの設定
-
プロジェクト>プロパティ>リンカー>入力>追加の依存ファイルに
ws2_32.libを追加する。(UDP/TCP通信用)
-
上部メニューのプロジェクト>プロパティ>C/C++>全般>追加のインクルードディレクトリに
./を追加する
- これをしないとincludeできない
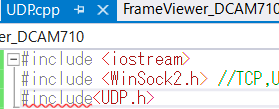
- これをしないとincludeできない
-
-
Unity側での受信プログラム
- 空オブジェクトを作ってUDPReceive.csスクリプトをアタッチする

- 空オブジェクトを作ってUDPReceive.csスクリプトをアタッチする
-
動かす
- send関数が呼ばれるとC++側からUDP通信で深度情報が送られる。
- 深度情報を使ったアプリケーションを作成できる。